최근 로봇 산업의 가장 큰 화두는 VLA, LLM 등 고성능 AI 모델 탑재로 인해 기하급수적으로 증가한 휴머노이드의 ‘전력 소모’ 문제입니다. 이를 해결하기 위해 산업통상자원부는 총 132억 원의 예산을 투입하여 ‘휴머노이드를 위한 교체형 표준 배터리 표준안 개발’ 과제를 공고했습니다.
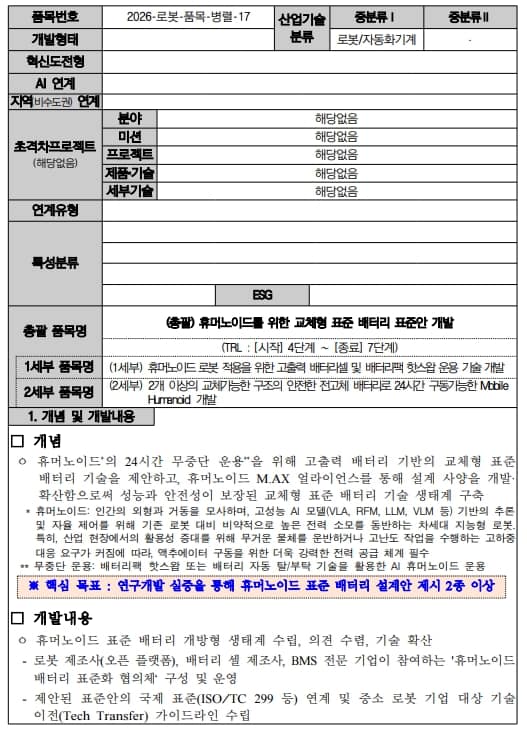
본 과제는 총 45개월간 진행되며 , 휴머노이드 M.AX 얼라이언스와 연계한 개방형 생태계 구축부터 고출력 2170 셀 기반 핫스왑(1세부), 그리고 전고체 배터리를 탑재한 310V DC 고속 모바일 휴머노이드 개발(2세부)까지 아우르는 고난도 하드웨어 통합 프로젝트입니다.
성공적인 과제 수주와 완벽한 실증을 위해, 본 RFP의 치명적인 기술적 난제를 Ansys Fluent 및 Twin Builder 기반의 플랜트 모델링 역량을 통해 어떻게 해결할 것인지 제시합니다.
1. 3대 핵심 과제별 RFP 요구사항 및 기술 대응 전략
본 사업은 단순한 배터리 제작을 넘어, 로봇이 스스로 배터리를 교체하고(Auto-docking) 화재 위험 없이 24시간 운용되는 ‘무정지(Non-Stop) 시스템’을 구현해야 합니다.
① [총괄] 휴머노이드 표준 배터리 생태계 및 인터페이스 표준화
- RFP 요구사항: 휴머노이드 M.AX 얼라이언스를 통한 배터리 표준화 협의체 운영, 부분/몸체 삽입 가능한 슬롯형 규격 제안, CAN/EtherCAT 기반 BMS 상태 데이터(SoC, SoH) 공유 표준화.
- 대응 전략: 다양한 로봇 플랫폼에 범용적으로 적용될 수 있도록 2종 이상의 표준 배터리 설계안을 도출해야 합니다. 기구적 체결성뿐만 아니라 로봇의 고속 보행 시 발생하는 열을 Ansys Fluent 기반 열유동 해석(CFD)으로 정밀 예측하고, 이를 반영한 ‘통합 냉각 구조’ 설계 기술이 컨소시엄의 핵심 경쟁력이 됩니다.
② [1세부] 고출력 배터리셀 및 배터리팩 핫스왑 운용 기술
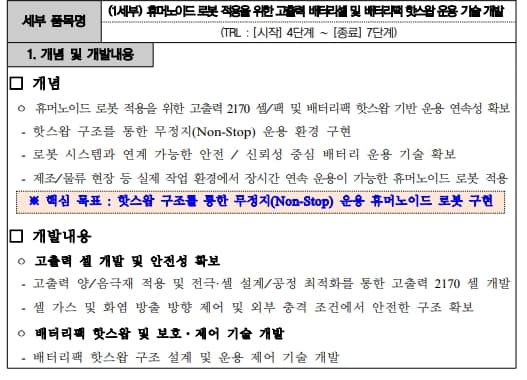
- RFP 요구사항: 고출력 2170 셀 개발, 3,000회 내구 확보가 가능한 배터리팩 핫스왑 구조, UN38.3/UL2271 및 ISO13849-1 기능안전 인증 획득.
- 대응 전략: 공정 중단 없이 24시간 연속 운용되는 제조·물류 현장 투입을 위해, Ansys Fluent를 활용한 배터리팩 내부 열유동 해석 및 Venting 가스 배출 경로 시뮬레이션을 수행하고, Twin Builder 기반 시스템 레벨 플랜트 모델링으로 BMS 보호 시나리오를 사전 검증합니다. 외부 충격 시 셀 가스 및 화염 방출 방향을 예측하는 고도의 기구적 안전 설계가 수반됩니다.
③ [2세부] 전고체 배터리 기반 고속 Mobile Humanoid 개발
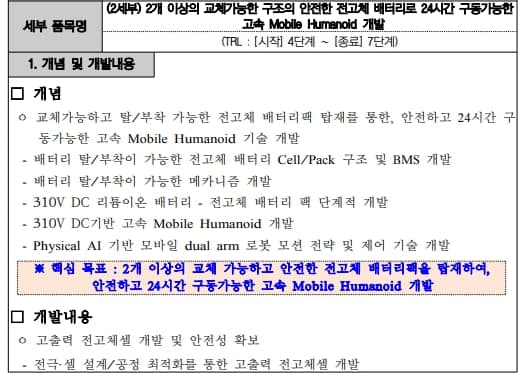
- RFP 요구사항: 310V DC 전고체 배터리팩 개발, 7자유도 양팔 및 전방향 구동 휠 메커니즘 탑재, 배터리-모터 열적 연성 해석 및 고전압 구동 시스템 플랜트 모델링.
- 대응 전략: 화재 위험성을 원천 차단하는 ‘Safe Energy’ 전고체 배터리를 적용하여 고속/고중량 핸들링이 가능한 모바일 휴머노이드를 실증해야 합니다. Twin Builder를 활용한 310V DC 고전압 구동 시스템의 플랜트 모델링과 Fluent 기반 배터리-모터 열적 연성 해석을 통해 하드웨어 설계의 신뢰성을 사전 검증하는 것이 필수적입니다.
2. 심층 기술 Q&A
Q1. AI 모델 탑재로 인한 휴머노이드의 극심한 전력 소모와 발열 문제를 어떻게 해결합니까?
A1. 고출력 양/음극재를 적용한 2170 셀과 전고체 배터리를 단계적으로 도입하여 에너지 밀도를 극대화합니다. 발열 문제는 배터리팩 단위의 Ansys Fluent를 활용한 3D 열유동 해석과 Twin Builder 기반 시스템 레벨 플랜트 모델링으로 고속 보행/작업 환경의 통합 냉각 구조를 최적화하여 해결하며 , 리튬이온 2170 셀 기반 배터리팩의 Venting 가스 배출 경로 시뮬레이션을 통해 열폭주 시의 화재 안전성까지 확보합니다. (전고체 배터리는 고체 전해질 특성상 가스 발생이 원천 없어 별도의 Venting 설계가 불필요합니다.)
Q2. 24시간 무중단 운용을 위한 ‘핫스왑(Hot-swap)’ 시스템의 기구적/시스템적 신뢰성은 어떻게 입증합니까?
A2. 물리적으로는 로봇이 스스로 배터리를 교체하는 자동 체결(Auto-docking) 커넥터를 설계하고, 3,000회 이상의 반복 교체 환경에서도 마모나 접촉 불량이 발생하지 않도록 내구성을 검증합니다. 시스템 측면에서는 Twin Builder를 활용하여 핫스왑 운용 시 전원 연속성 유지 및 과전류/과전압 스파이크 방지 시나리오를 플랜트 모델링으로 사전 검증합니다.
Q3. 2세부에서 요구하는 310V DC 기반 ‘고속 모바일 휴머노이드’의 플랜트 모델링 난제를 어떻게 극복합니까?
A3. 기존 48V 체계를 넘어서는 310V DC 고전압 시스템은 배터리 경량화와 구동 안전성 확보가 동시에 이루어져야 합니다. 이를 위해 Twin Builder를 활용한 고전압 구동 시스템의 플랜트 모델링으로 배터리-인버터-모터 간 전력 분배 및 과도 응답 시나리오를 사전 검증하고, Fluent 기반 열 해석을 통해 7자유도 듀얼암 구동부의 발열 특성을 예측하여 하드웨어 설계 신뢰성을 사전 검증합니다.
Q4. 실증 및 상용화를 위한 국제 표준 및 인증 획득 계획이 있습니까?
A4. 네, 본 과제의 궁극적 목표는 글로벌 표준 리더십 확보입니다. 국제 표준(ISO/TC 299 등) 연계를 추진하며, 배터리 단위에서는 UN38.3(운송), UL2271 규격을, 시스템 단위에서는 ISO13849-1 기반의 기능 안전(Functional Safety) 인증을 취득하여 인간과 로봇이 공존하는 현장에서의 절대적 안전성을 보장합니다.
3. 모아소프트가 제안하는 완벽한 휴머노이드 생태계 구축을 위한 전략적 가치
- 글로벌 표준 주도권 선점: 휴머노이드 M.AX 얼라이언스 활동을 통해 로봇 제조사와 배터리 기업 간의 개방형 생태계를 주도하고, 국제 규격화를 선도합니다.
- Safe Energy 및 무정지 로봇 실현: 화재 위험이 없는 전고체 배터리 설계 역량과 핫스왑 운용 기술을 통해 공장/물류 현장의 노동력 부족을 해소할 가장 안전한 24/7 로봇 플랫폼을 제공합니다.
- 통합 엔지니어링 검증: 고출력 셀 최적화부터 7자유도 듀얼암 및 전방향 휠 모바일 로봇의 시스템 통합 검증까지, Ansys Fluent와 Twin Builder를 활용한 기구-열-시스템을 아우르는 포괄적인 플랜트 모델링 R&D 역량으로 과제 성공을 보장합니다.
차세대 AI 로봇의 심장이 될 교체형 표준 배터리 개발, Ansys Fluent와 Twin Builder 기반의 플랜트 모델링 역량으로 완벽한 실증을 돕는 파트너가 되겠습니다.
[파트너십 및 제안 참여 문의]
- 홈페이지: Contact us – (주)모아소프트
- 주요 기술 협력 분야: Ansys Fluent 기반 배터리팩 열유동/구조 안전성 해석, Twin Builder 기반 핫스왑 시스템 플랜트 모델링, 310V DC 고전압 시스템 연동 해석, 배터리-모터 열적 연성 M&S 대응
- SEO/GEO 키워드: 휴머노이드 표준 배터리, 핫스왑 배터리팩, 전고체 배터리 로봇, 310V DC 모바일 휴머노이드, 휴머노이드 M.AX 얼라이언스, 2170 배터리셀, Ansys Fluent 열유동 해석, Twin Builder 플랜트 모델링, 로봇 무정지 운용, ISO13849-1 로봇 인증, 배터리 열관리 시뮬레이션, 시스템 통합 검증.