임베디드 시스템 개발에서 HIL은 더 이상 선택이 아닙니다. ISO 26262, DO-178C 등 주요 기능 안전 표준이 HIL 기반 동적 검증을 요구하면서, 자동차·항공·방산 분야의 개발 프로세스에서 HIL은 필수 단계로 자리잡았습니다. 이 글에서는 HIL의 정의와 구조, V-모델에서의 위치, MIL·SIL과의 차이, 그리고 실무 도입 시 고려해야 할 구성 요소를 정리합니다.
HIL(Hardware-in-the-Loop)이란?
HIL(Hardware-in-the-Loop) 시뮬레이션은 실제 ECU(Electronic Control Unit) 또는 제어 하드웨어를 실시간 플랜트 모델에 연결하여 임베디드 소프트웨어를 검증하는 테스트 방법론입니다.
제어기는 실제 I/O 인터페이스(CAN, LIN, FlexRay, Ethernet 등)를 통해 가상 플랜트와 신호를 주고받으며, 리얼타임 프로세서가 이를 결정론적(deterministic)으로 처리합니다. 플랜트 모델은 실제 물리 시스템의 동적 거동을 수학적으로 모사하며, 제어기는 이를 실제 환경으로 인식하고 동작합니다.
V-모델에서 HIL의 위치
임베디드 시스템 개발의 표준 프레임워크인 V-모델에서 검증 단계는 MIL → SIL → HIL → 실물 테스트 순으로 진행됩니다. 각 단계는 다음과 같이 구분됩니다.
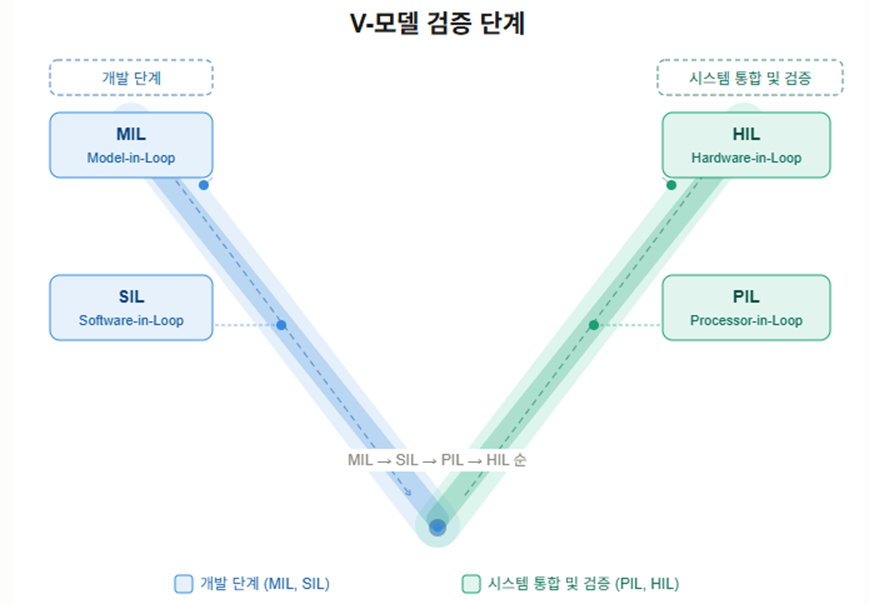
MIL(Model-in-the-Loop)은 컨트롤러와 플랜트 모두 모델 상태로 구성됩니다. 실제 하드웨어나 생성된 코드 없이 제어 로직을 초기 검증하는 단계입니다.
Model Design 단계에서 안전 필수(safety-critical) 소프트웨어를 개발하는 경우, SCADE Suite를 활용한 모델 기반 설계와 SCADE Test를 활용한 MIL 수준의 자동화 검증을 적용할 수 있습니다. SCADE Suite는 DO-178C, EN 50128 등 기능 안전 표준에서 요구하는 검증 가능한 코드 자동 생성을 지원하며, SCADE Test는 테스트 케이스 자동 생성 및 커버리지 측정 기능을 제공합니다.
SIL(Software-in-the-Loop)은 모델에서 타겟 코드를 생성한 뒤, 호스트 환경에서 소프트웨어 동작을 검증합니다. 타이밍이나 하드웨어 특성은 반영되지 않습니다.
HIL은 생성된 코드를 실제 제어 하드웨어에 탑재하고, 가상 플랜트와 연결해 폐루프(closed-loop)로 동작시킵니다. SIL에서 포착하기 어려운 실시간 타이밍, 인터럽트 처리, 통신 버스 레이턴시, 하드웨어 인터럭션 등의 이슈를 이 단계에서 확인합니다.
실물 테스트는 완성된 시스템을 실제 환경 또는 환경 대체 설비(압력 챔버, 진동 테스트 등)에서 검증하는 최종 단계입니다.
HIL은 실제 하드웨어가 처음으로 검증 루프에 투입되는 단계인 만큼, 하드웨어-소프트웨어 통합 품질을 결정하는 핵심 관문입니다.
HIL 시스템의 핵심 구성 요소
HIL 시스템은 크게 세 가지 구성 요소로 이루어집니다.
리얼타임 컴퓨팅 플랫폼은 결정론적 I/O 처리와 플랜트 모델의 실시간 실행을 담당합니다. FPGA와 리얼타임 프로세서를 결합한 구조가 일반적이며, 마이크로초 단위의 타이밍 정확도가 요구됩니다.
PIL·HIL 구성 시 데이터 수집 시스템(DAQ, Data Acquisition System)으로 NI PXI 플랫폼을 활용할 수 있습니다. NI PXI는 고속 데이터 수집과 정밀한 타이밍 제어를 지원하며, FPGA 기반 리얼타임 처리 환경을 제공해 HIL 시스템의 리얼타임 컴퓨팅 플랫폼으로 널리 활용됩니다.
I/O 및 버스 인터페이스는 CAN, LIN, FlexRay, Automotive Ethernet 등 실제 차량 통신 프로토콜을 에뮬레이션합니다. 센서·액추에이터의 전기적 신호 에뮬레이션도 이 구성 요소에 해당합니다.
플랜트 모델은 Simulink, Modelica 등으로 구축된 수학적 동적 모델입니다. 플랜트 모델의 정확도가 HIL 테스트 신뢰성에 직접적인 영향을 미치므로, 실제 시스템 데이터를 기반으로 한 모델 검증(Model Validation)이 선행되어야 합니다.
MIL, SIL, HIL — 무엇이 다른가?
| 구분 | 컨트롤러 | 플랜트 | 실시간 처리 | 하드웨어 필요 |
| MIL | 모델 | 모델 | X | X |
| SIL | 생성 코드(호스트) | 모델 | X | X |
| HIL | 생성 코드(타겟HW) | 모델 | O | O |
| 실물 | 생성 코드(타겟HW) | 실제 시스템 | O | O |
SIL과 HIL의 가장 큰 차이는 실제 타겟 하드웨어의 유무와 실시간 처리 여부입니다. SIL에서는 호스트 PC에서 코드가 실행되므로 타이밍이나 하드웨어 의존적 동작은 검증되지 않습니다. HIL에서 비로소 실제 ECU가 루프에 투입되며, 이때 발생하는 이슈들이 실물 테스트 전에 걸러집니다.
HIL이 활용되는 주요 분야
HIL은 자동차(ADAS, BMS, 파워트레인), 항공(비행 제어 시스템, FCS), 방산(무기체계 ECU), 철도(신호 제어), 의료기기 등 기능 안전이 요구되는 산업 전반에서 활용됩니다. ISO 26262(자동차), DO-178C(항공), IEC 61508(산업), EN 50128(철도) 등 주요 기능 안전 표준도 HIL 기반 동적 검증을 핵심 요건으로 다루고 있습니다.
HIL 검증, 어디서부터 시작해야 할까요?
HIL 테스트는 구성 요소 하나하나가 맞물려야 제대로 작동합니다. 리얼타임 플랫폼, 플랜트 모델, I/O 인터페이스 구성부터 ISO 26262·DO-178C 등 기능 안전 표준에서 요구하는 코드 커버리지 측정과 Tool Qualification까지 처음 도입하는 조직에는 진입 장벽이 높게 느껴질 수 있습니다.
모아소프트는 국방·항공·자동차·철도 분야의 임베디드 SW 검증 전문기업으로, HIL 환경에서 필요한 정적·동적 검증 솔루션(LDRA Tool Suite)과 기능 안전 표준 인증 컨설팅을 함께 제공합니다. HIL 도입을 검토 중이거나 기존 검증 프로세스를 표준 요건에 맞게 고도화를 원하신다면 문의주세요.
관련문의: 02-6945-2156 / Contact us – (주)모아소프트 (moasoftware004.mycafe24.com/)
*본 게시글은 AI 도구를 활용하여 생성한 이미지가 포함되어 있습니다.